Hệ thống robot in 3D di động chế tạo bê tông kích thước lớn
TNNN - Việc kết hợp một cách hợp lý công nghệ robot với công nghệ in 3D đã giúp có được hệ thống robot in 3D di động có khả năng tạo ra những tấm bê tông có kích thước lớn trong thời gian ngắn hơn so với các hệ thống trước đây.
- Chế phẩm vi khuẩn tía quang hợp không lưu huỳnh
- Thủ tướng yêu cầu xử lý nghiêm hành vi sản xuất khẩu trang không đảm bảo chất lượng
Thử nghiệm cánh tay robot mới để ứng dụng in 3D
Hiện nay, trong ngành xây dựng của Việt Nam, khả năng ứng dụng in 3D đang hứa hẹn là mảnh đất màu mỡ. Tuy nhiên, trở ngại lớn nhất khiến ứng dụng in 3D trong xây dựng vẫn còn hạn chế là khả năng mở rộng quy mô của các hệ thống in 3D. Phần lớn những giàn in 3D hoặc cánh tay robot in 3D hiện nay chỉ in được các cấu trúc có kích thước giới hạn trong thể tích của giàn in hoặc tầm với của cánh tay robot. Để khắc phục nhược điểm này, một số máy in 3D được gắn thêm phần “chân” có thể di chuyển. Dù vậy, mỗi khi in, các hệ thống này phải đứng yên, sau khi kết thúc mới có thể di chuyển sang vị trí mới. Điều này khiến thời gian in sẽ kéo dài hơn và kích thước vật liệu trong mỗi lần in vẫn còn hạn chế.
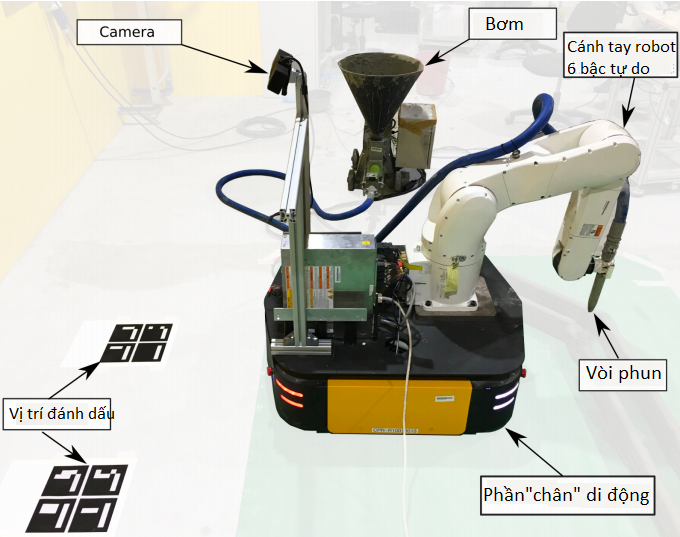 Hệ thống robot in 3D di động do nhóm nghiên cứu của TS. Phạm Quang Cường phát triển. Nguồn: 3D Printing Industry
Hệ thống robot in 3D di động do nhóm nghiên cứu của TS. Phạm Quang Cường phát triển. Nguồn: 3D Printing Industry
Để giải quyết vấn đề này, TS. Phạm Quang Cường, trưởng nhóm nghiên cứu Điều khiển robot (CRI) và các cộng sự ở Đại học Công nghệ Nanyang đã phát triển hệ thống in 3D mới có khả năng vừa in vừa di chuyển, tạo ra những khối bê tông có kích cỡ lớn trong thời gian ngắn hơn, góp phần tăng hiệu quả ứng dụng của công nghệ in 3D trong lĩnh vực xây dựng. Nhóm nghiên cứu đã công bố kết quả này trong bài báo “Printing-while-moving: a new paradigm for large-scale robotic 3D Printing” trên tạp chí IEEE Xplore vào đầu năm nay.
“Hệ thống của chúng tôi được gắn trên một robot di động có khả năng di chuyển trong không gian, cho phép hệ thống in 3D tạo ra những cấu trúc lớn hơn so với kích cỡ của chính nó”, TS. Phạm Quang Cường giới thiệu với tạp chí 3D Printing Industry về những tính năng mới mà sản phẩm của mình có được sau một quãng thời gian tìm tòi, nghiên cứu. “Bên cạnh đó, việc có ‘chân’ di động giúp người dùng có thể đưa robot vào các công trường xây dựng và di chuyển trong đó dễ dàng hơn”.
Thực chất, đây không phải là hệ thống robot in 3D đầu tiên do nhóm nghiên cứu của TS. Phạm Quang Cường chế tạo. Anh và các cộng sự đã theo đuổi hướng nghiên cứu robot in 3D từ lâu với mục tiêu “tạo ra robot có thể ứng dụng trong thực tế sản xuất, giúp giảm bớt sức lao động của con người”. Năm 2018, nhóm nghiên cứu đã công bố một hệ thống robot in 3D có thể in các cấu trúc ở kích cỡ lớn. Theo đó, hệ thống này gồm nhiều cánh tay robot cùng phối hợp in đồng thời với nhau, được gọi là “robot in theo nhóm” (swarm robot). Mặc dù khắc phục được các nhược điểm của các hệ thống in 3D trước đây về mặt kích cỡ in song TS. Phạm Quang Cường cho biết, việc phát triển các chương trình phần mềm để các cánh tay robot trong hệ thống này có thể chuyển động và phối hợp chính xác, tránh va chạm vào nhau là điều rất phức tạp.
Bởi vậy, nhóm nghiên cứu đã tiếp tục tìm cách cải tiến hệ thống này. Sau nhiều thời gian mày mò thử nghiệm, TS. Phạm Quang Cường và các cộng sự quyết định thay đổi thiết kế hệ thống: chỉ sử dụng một cánh tay robot in 3D thay vì nhiều cánh tay, tuy nhiên cánh tay này sẽ có khả năng vừa in vừa di chuyển, giúp in được các cấu trúc có kích cỡ lớn. Tuy nhiên, việc kết hợp giữa in 3D và di chuyển cùng lúc đòi hỏi các chuyển động này phải được lên kế hoạch và phối hợp một cách cẩn thận. Nếu robot không xác định đúng vị trí đặt vòi phun bê tông trong quá trình in 3D, vị trí vòi phun giữa hai lớp liền nhau chỉ cần bị lệch khoảng 1cm thì cấu trúc khối bê tông sẽ bị phá vỡ.
Để giải quyết những thách thức này, nhóm nghiên cứu đã phát triển các thuật toán về hoạch định robot (lập kế hoạch chuyển động của robot), thị giác robot,.. Đây không phải là một bài toán quá phức tạp với TS. Phạm Quang Cường và các cộng sự bởi trước đó, nhóm nghiên cứu của anh đã có kinh nghiệm trong việc chế tạo các sản phẩm robot có độ linh hoạt và chính xác cao, tiêu biểu là robot lắp đặt ghế Ikea và robot lắp đặt thấu kính đã được thương mại hóa thành công. TS. Phạm Quang Cường cho biết, nghiên cứu về robot lắp ghế Ikea là nền tảng quan trọng để nhóm nghiên cứu phát triển robot in 3D.
Hệ thống in 3D mới do nhóm nghiên cứu chế tạo bao gồm một chân đế di động dạng holonomic (có số bậc tự do bằng với số bậc tự do có thể điều khiển, tức là có thể di chuyển theo mọi hướng) cùng với một robot 6 bậc tự do được lắp phía trên và một vòi phun bê tông được nối với một máy bơm qua một ống mềm. Các chuyển động phối hợp của chân đế di động và cánh tay robot được lập trình sẵn để thực hiện in bồi đắp từng lớp một. Trong quá trình in, vị trí chân đế di động được kiểm soát và gửi lại phản hồi theo thời gian thực giúp nhóm nghiên cứu theo dõi các chuyển động một cách chặt chẽ nhất có thể. Điều này không chỉ ngăn ngừa những va chạm tiềm ẩn giữa các cánh tay robot với chân đế mà còn là phương pháp hiệu quả để kiểm soát độ chính xác trong suốt quá trình hoạt động.
Nhóm nghiên cứu đã sử dụng hệ thống ghi hình chuyển động của Optitrack - nhà cung cấp công nghệ ghi hình chuyển động lớn nhất thế giới để kiểm tra độ chính xác của cánh tay in 3D bằng cách ghi lại các chuyển động trong không trung. Kết quả cho thấy hệ thống in 3D do nhóm nghiên cứu của TS. Phạm Quang Cường chế tạo có thể tạo ra 10 lớp bê tông, tạo ra một lớp hoàn thiện tương tự các hệ thống hiện có. Ngoài ra, độ chênh lệch giữa tuyến đường hoạch định sẵn và tuyến đường tối ưu của máy in là 9.8mm - kết quả tốt hơn đáng kể so với trường hợp tốt nhất trước đây từng được ghi nhận ở các loại máy thông thường là 20mm.
Khi thử nghiệm trong môi trường sản xuất, hệ thống do nhóm nghiên cứu chế tạo có thể tạo ra một cấu trúc có kích cỡ 210cm × 45cm × 10cm, lớn hơn khá nhiều so với tầm với của cánh tay robot (87 cm). Hơn nữa, vật liệu này rất rắn chắc, dù để nghiêng hay lật ngược cũng không bị vỡ.
Mặc dù hệ thống in 3D do nhóm nghiên cứu của TS. Phạm Quang Cường chế tạo đã chứng minh được hiệu quả song theo anh, công nghệ này vẫn còn một số hạn chế, chẳng hạn như việc xác định vị trí của điểm đánh dấu cơ sở (fiducial marker) vẫn còn lỗi và camera bị rung trong quá trình di chuyển. Nhóm nghiên cứu cho biết sẽ tiếp tục cải thiện những vấn đề này bằng cách hiệu chỉnh cẩn thận hơn và lắp đặt bộ chống rung cho camera.
Trong những năm gần đây, sự phát triển của thị trường in 3D ngành xây dựng trên thế giới đã hứa hẹn tiềm năng thương mại hóa của sản phẩm robot in 3D do TS. Phạm Quang Cường và các cộng sự phát triển. Đây là một trong những lý do quan trọng để anh và cộng sự tin tưởng vào khả năng thương mại hóa của hệ thống robot in 3D di động.
Nguồn: Khoa học và Phát triển
Bình luận
Tin khác

Gợi mở về vai trò của diêm tiêu Việt Nam trong lịch sử thế giới

Thiết kế pin mới giúp giảm nguy cơ cháy nổ
JASIS 2025 – Triển lãm thiết bị khoa học và phân tích hàng đầu châu Á

Cấp thiết sửa đổi quy chuẩn kỹ thuật quốc gia cho sản phẩm sữa chế biến

Kiểm tra, xác nhận giá trị sử dụng phương pháp; ước lượng độ không đảm bảo đo lĩnh vực sinh học
Tin cũ hơn

Đảm bảo chất lượng kết quả thử nghiệm

Nhận thức chung ISO/IEC 17025:2017 và đánh giá nội bộ

Xác nhận giá trị sử dụng phương pháp thử trong phân tích hóa học

Triệt để tránh tình trạng “dễ làm, khó bỏ” trong nghiên cứu khoa học

Báo động: Vi nhựa xâm nhập não người với tốc độ nhanh